


A inovação na medicina não para de surpreender, e a robótica cirúrgica está na linha de frente. Imagine um cirurgião minúsculo, menor que um grão de arroz, capaz de realizar múltiplos procedimentos sem precisar de bateria para funcionar.
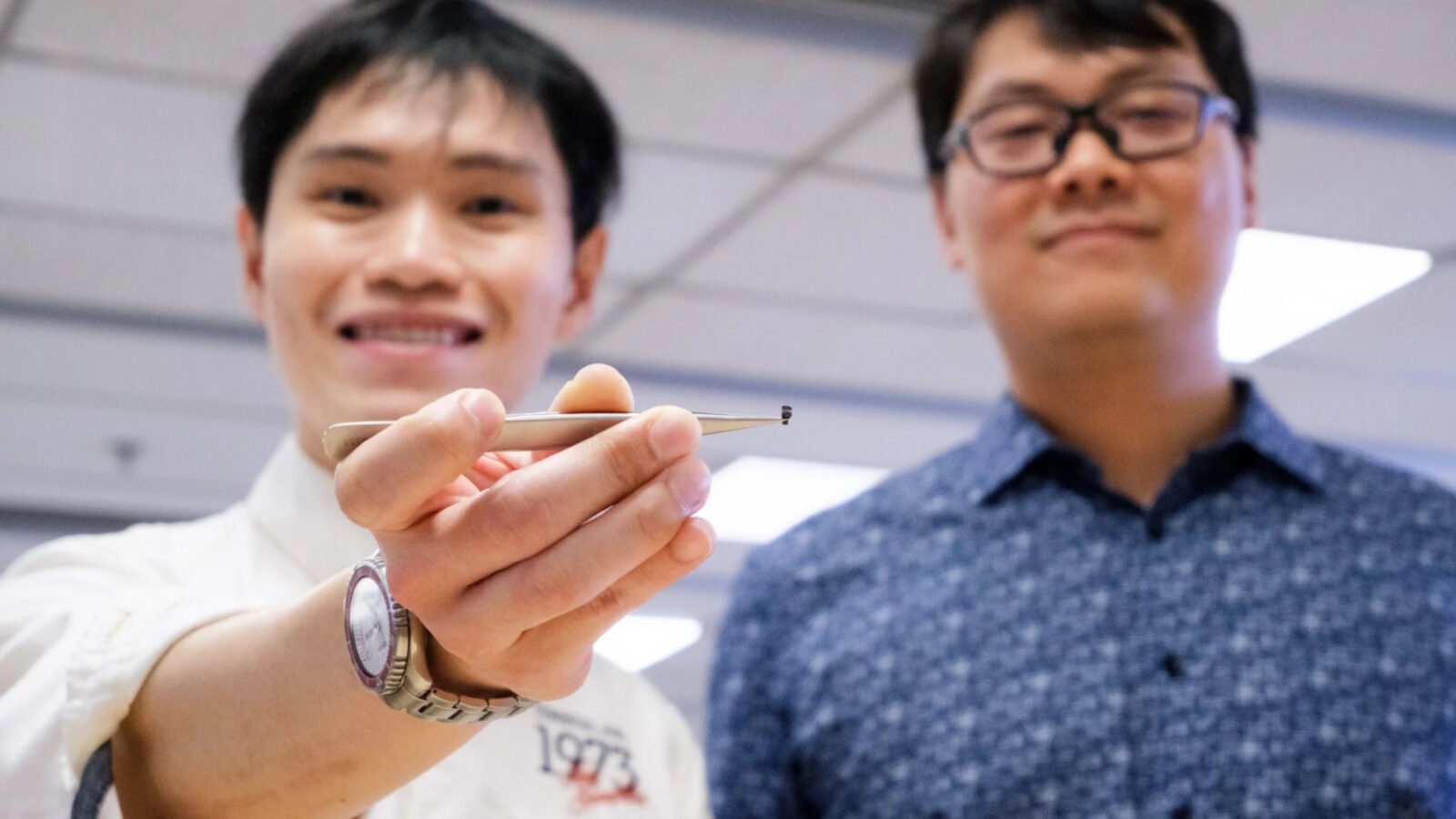
Essa é a realidade que pesquisadores da Nanyang Technological University (NTU), em Singapura, estão construindo. Eles desenvolveram um microrrobô experimental de apenas 4,4 milímetros de comprimento.
Este pequeno dispositivo representa um salto significativo na busca por cirurgias menos invasivas e mais precisas. Sua capacidade de operar por meio de campos magnéticos externos elimina a necessidade de componentes eletrônicos complexos a bordo.
Embora ainda esteja em fase de testes laboratoriais, a tecnologia é promissora. O protótipo tem demonstrado ser capaz de executar cinco funções médicas distintas, abrindo um novo horizonte para procedimentos cirúrgicos, diagnósticos e entrega de fármacos.
A Revolução da Robótica Médica em Miniatura
A medicina moderna busca constantemente métodos menos invasivos. Cirurgias complexas, que antes exigiam grandes incisões, hoje são realizadas com cortes mínimos, resultando em menor dor e recuperação mais rápida para o paciente.
O desenvolvimento de microrrobôs é o próximo passo lógico nessa evolução. Estes pequenos 'agentes' podem alcançar áreas do corpo humano que seriam de difícil acesso para instrumentos convencionais, como vasos sanguíneos estreitos ou órgãos delicados.
A ideia é revolucionar não apenas o procedimento em si, mas também a experiência do paciente. Este robô cirurgião se encaixa perfeitamente nesse cenário de avanço contínuo da robótica médica, focando na precisão e na minimização de riscos.
A pesquisa da NTU se insere na área da robótica médica acionada por magnetismo. Esta vertente foca no controle de dispositivos minúsculos utilizando forças magnéticas geradas externamente, permitindo que os robôs se movam e atuem sem depender de fontes de energia internas.
Como o Microrrobô Magnético Funciona?
O Poder do Magnetismo e da Robótica Suave
O grande trunfo deste microrrobô é sua simplicidade e eficácia. Ele não possui motor, bateria ou circuitos eletrônicos embarcados. Sua movimentação e funcionalidades dependem de partículas magnéticas microscópicas.
Estas partículas são incorporadas em materiais flexíveis, como silicones, típicos da chamada robótica suave. O controle é feito por campos magnéticos externos, que guiam o robô com precisão.
Ao manipular a intensidade e a direção desses campos, os pesquisadores conseguem fazer o dispositivo se deslocar, girar e executar ações específicas. É como ter uma 'mão invisível' operando dentro do corpo, com total controle do cirurgião.
Essa abordagem elimina a complexidade e o risco de falha associados a sistemas eletrônicos internos. A ausência de baterias, por exemplo, é crucial para evitar superaquecimento ou a necessidade de recarga durante um procedimento prolongado.
A robótica suave, por sua vez, garante que o robô seja flexível e possa se adaptar a diferentes anatomias sem causar danos. Essa característica é vital para a segurança do paciente em ambientes biológicos.
Multifuncionalidade e Agilidade Operacional
Uma das características mais impressionantes deste robô é sua capacidade de executar múltiplas tarefas. O protótipo da NTU foi projetado para cinco funções médicas distintas, demonstrando sua versatilidade.
Entre elas, estão a locomoção controlada para navegar no corpo, o corte de tecidos com precisão cirúrgica, a liberação direcionada de fármacos em locais específicos e a coleta de amostras biológicas para diagnóstico.
Além disso, o dispositivo pode gerar calor em pontos específicos, o que pode ser útil para cauterização ou eliminação de células indesejadas. Essa combinação significa que um único microrrobô pode atuar em diversas etapas de um procedimento cirúrgico.
A inovação não para por aí. Os pesquisadores conseguiram reconfigurar o magnetismo interno do robô, permitindo que diferentes regiões do dispositivo reajam de forma independente ao mesmo campo magnético externo.
Em menos de um segundo, o microrrobô pode alternar entre suas funções, tornando-o incrivelmente ágil e eficiente. Essa agilidade é crucial em cenários médicos onde o tempo é um fator determinante.
Um sexto modo de movimento também foi explorado: a rotação do próprio corpo do robô ao longo de seu eixo. Essa capacidade expande ainda mais sua habilidade de navegar em ambientes complexos e estreitos com destreza.
Testes Promissores e o Caminho para a Aplicação Clínica
Resultados de Laboratório e Biocompatibilidade
Nos testes iniciais, o robô cirurgião foi avaliado em materiais que simulam tecidos biológicos. Amostras de fígado animal também foram utilizadas para demonstrar suas capacidades de corte e manipulação. Os resultados foram promissores, confirmando a eficácia das funções propostas.
Um aspecto crucial para qualquer dispositivo médico é a biocompatibilidade. Ensaios celulares indicaram uma alta taxa de viabilidade das células expostas aos materiais do robô, sugerindo uma baixa toxicidade. Este é um passo fundamental para futuras aplicações em seres humanos.
Desafios e Próximos Passos
Apesar dos avanços notáveis, é importante ressaltar que o sistema ainda está longe do uso clínico em pacientes. Atualmente, o controle do microrrobô é totalmente externo e depende da habilidade de operadores especializados.
A visão de um robô cirurgião autônomo requer mais pesquisa e desenvolvimento significativo. A navegação em um ambiente biológico real, com fluidos e estruturas dinâmicas, apresenta desafios complexos.
É preciso desenvolver sistemas de controle mais sofisticados e mecanismos de feedback em tempo real para garantir que o robô possa operar com máxima segurança e precisão dentro do corpo humano. A interação com o corpo humano é um fator crítico.
Regulamentações rigorosas também são um obstáculo a ser superado. Antes de ser aprovado para uso em pacientes, o microrrobô passará por inúmeras etapas de validação, testes pré-clínicos e clínicos. A colaboração entre engenheiros, médicos e órgãos reguladores será essencial para acelerar esse processo de forma segura.
O próximo passo para os pesquisadores da NTU inclui refinar o controle do dispositivo, investigar novas funcionalidades e explorar formas de integração com outras tecnologias. O objetivo final é transformar a maneira como as cirurgias são realizadas, tornando-as mais seguras, eficazes e menos invasivas.
Acompanhe atualizações aqui na Academia Nerds.








{kind=link}
Deixe um comentário