


Pesquisadores do Instituto Italiano de Tecnologia (IIT) desenvolveram um avanço notável no campo da robótica. Eles criaram um braço robótico flexível, inspirado nos tentáculos de polvos, capaz de detectar contato e ajustar sua força de pegada de forma totalmente autônoma.
Esta inovação promete revolucionar a maneira como máquinas interagem com o mundo físico, especialmente em ambientes complexos. O dispositivo incorpora sensores táteis avançados diretamente em suas ventosas artificiais, permitindo que o braço robótico tome decisões em tempo real sobre a manipulação de objetos.
Ele pode se adaptar instantaneamente a diferentes formas e texturas. O trabalho foi detalhado em um estudo publicado na renomada revista científica Nature Machine Intelligence.
A Inspiração por Trás da Inovação
A ideia de um braço robótico com essas capacidades não surgiu do nada. A equipe do IIT buscou inspiração em uma das criaturas mais fascinantes do oceano: o polvo. Esses cefalópodes são mestres da manipulação, e seus tentáculos são ferramentas incrivelmente versáteis.
Os tentáculos de um polvo são notáveis por sua autonomia parcial. Eles contêm uma vasta rede de neurônios distribuídos ao longo de sua estrutura, o que permite que cada seção do tentáculo execute movimentos complexos e responda a estímulos locais sem a necessidade de um comando direto do cérebro central do animal. É uma forma de inteligência distribuída.
Os cientistas entenderam que replicar essa característica biológica poderia ser um divisor de águas na robótica bioinspirada. Em vez de um sistema de controle centralizado para cada movimento, o braço robótico foi projetado para ter inteligência em suas próprias pontas. Essa abordagem abre caminho para sistemas mais adaptáveis e eficientes.
Como o Braço Robótico Funciona
O design do braço robótico do IIT se baseia em princípios de detecção e resposta local. A tecnologia foca na integração de sensores diretamente nas partes que interagem com o ambiente, reduzindo a dependência de algoritmos complexos de processamento centralizado para tarefas simples de manipulação.
Os Sensores Táteis e Ventosas Inteligentes
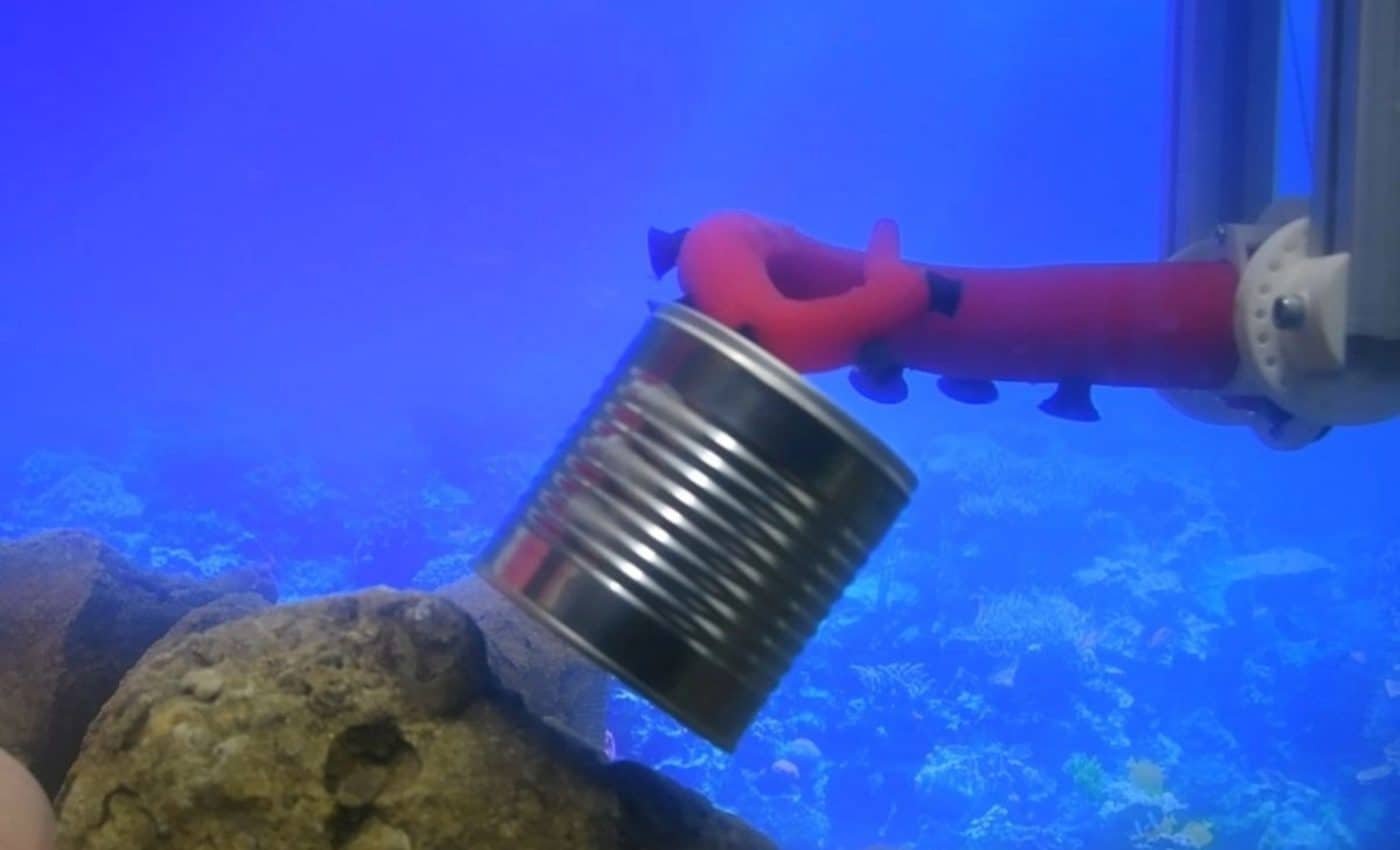
A chave para a autonomia deste braço está em suas ventosas artificiais. Cada uma delas é equipada com um sistema sensor óptico inovador. Esse sistema funciona como um 'anel de luz' embutido na estrutura da ventosa.
Quando a ventosa entra em contato com um objeto, a superfície flexível se deforma. Essa deformação altera a maneira como a luz é refletida dentro do anel sensor, e os sensores detectam essas mudanças. Com base na alteração da reflexão, o sistema consegue identificar não apenas o contato, mas também a intensidade e a direção da força aplicada.
Essa capacidade de detectar deformações em tempo real é crucial. Ela permite que o braço entenda a pressão que está aplicando e a geometria do objeto, como se cada ventosa tivesse seu próprio sentido do tato bastante apurado.
Autonomia na Pegada
Com os dados coletados pelos sensores táteis, o braço robótico pode agir de forma autônoma. Ele não precisa esperar por instruções de um controlador central para ajustar sua pegada. Se um objeto é escorregadio, o braço pode aumentar a força de aderência; se é frágil, ele pode reduzi-la.
Essa capacidade de ajuste automático é fundamental para manipular objetos diversos, sejam superfícies lisas, irregulares ou objetos com diferentes pesos e fragilidades. A autonomia na pegada garante uma interação segura e eficaz, minimizando danos tanto ao robô quanto ao objeto.
O sistema processa as informações localmente em cada ventosa. Isso resulta em uma resposta rápida e precisa, e a coordenação entre as múltiplas ventosas permite que o braço se adapte dinamicamente durante todo o processo de agarrar e manipular.
Testes e Desempenho Inicial
O protótipo desenvolvido pelo Instituto Italiano de Tecnologia demonstrou sua eficácia em uma série de testes. O braço robótico possui aproximadamente 40 centímetros de comprimento e é equipado com 10 ventosas artificiais distribuídas ao longo de um de seus lados.
Durante os experimentos, o braço robótico foi capaz de identificar e agarrar com sucesso diversos tipos de objetos. Isso incluiu testes realizados em ambientes submersos. A capacidade de operar debaixo d'água é uma das vantagens chave desta tecnologia, inspirada na sua contraparte biológica.
Apesar do sucesso, os pesquisadores ressaltam que a tecnologia ainda está em desenvolvimento. Atualmente, o protótipo é mais eficaz com a manipulação de objetos leves e de geometria relativamente simples. O aprimoramento da capacidade de carga e da complexidade dos objetos é o próximo passo.
Potenciais Aplicações e o Futuro
As capacidades do braço robótico inspirado em polvo abrem portas para uma vasta gama de aplicações futuras. Uma das áreas mais promissoras é a exploração oceânica, onde robôs com esses braços poderiam ser usados para monitorar ambientes marinhos delicados ou para coletar amostras biológicas sem danificá-las.
Imagine a coleta de organismos frágeis ou amostras de ecossistemas profundos. A precisão e a suavidade da pegada seriam inestimáveis, e a capacidade de operar autonomamente debaixo d'água, sem a necessidade de controle humano constante, é outro grande benefício.
Além disso, esta tecnologia pode ter impacto em outros setores. Na indústria, poderia ser usada para a montagem de componentes delicados ou para o manuseio de materiais frágeis em linhas de produção automatizadas. A automação de tarefas que exigem um alto grau de destreza manual e sensibilidade pode se beneficiar enormemente.
No campo da medicina, protótipos futuros poderiam auxiliar em cirurgias minimamente invasivas, onde a precisão e a capacidade de adaptação são críticas. A engenharia robótica e a inteligência artificial continuam a avançar, e inovações como esta pavimentam o caminho para robôs mais versáteis e autônomos. Este desenvolvimento representa um passo significativo em direção a robôs que podem interagir com o mundo de forma mais natural e intuitiva.
Acompanhe atualizações aqui na Academia Nerds.








{kind=link}
Deixe um comentário